科研动态
进入工厂一年后,“我是正式的”人形机器人要
作者:bet356体育官方网站日期:2025/05/01 浏览:
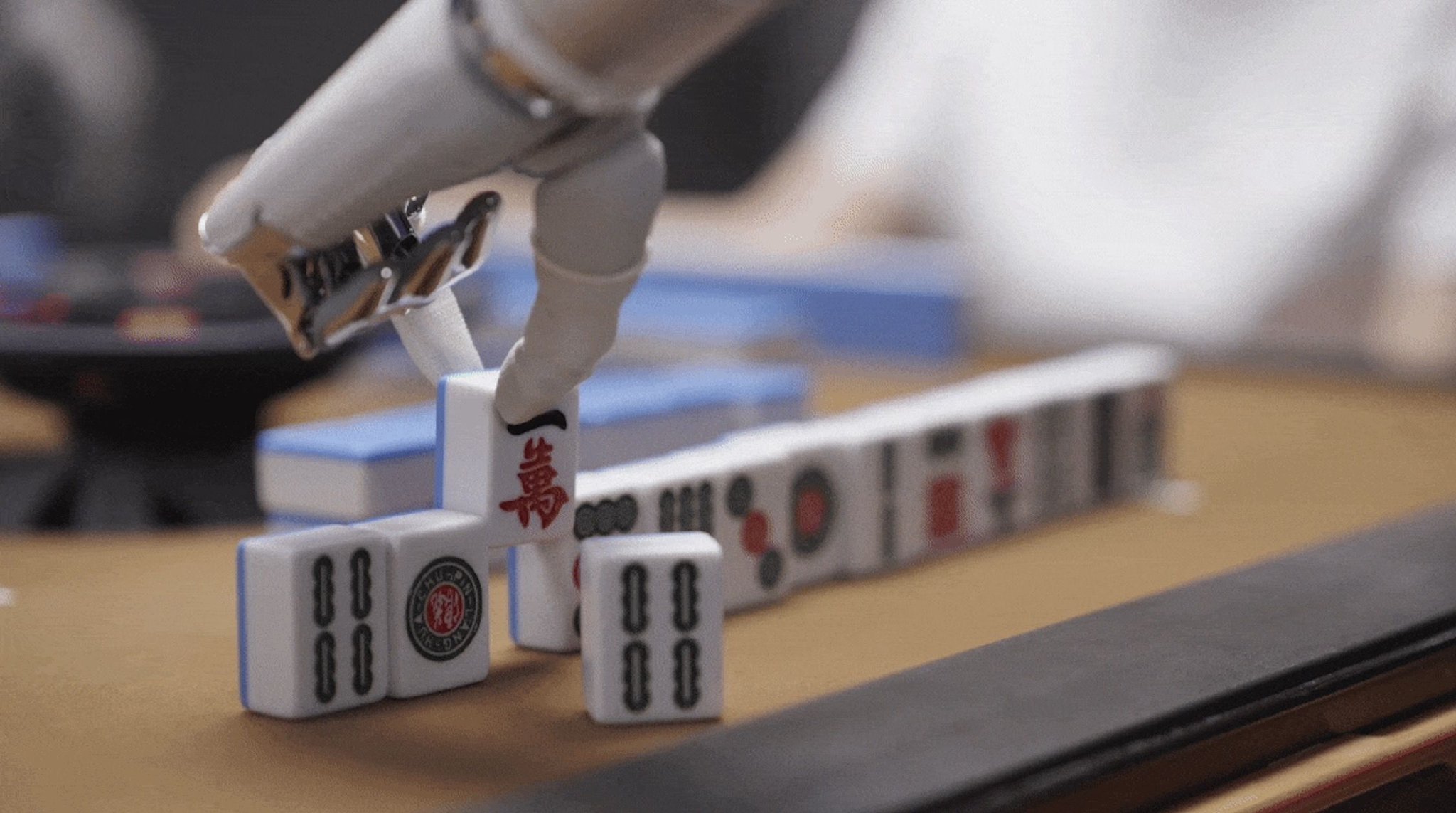 在实际情况下,机器人刚离开实验室要创造好处多长时间?最近,Lingchu Intelligent是一个体现的智能开始,发布了PSI-R1模型,并说配备了“真正的VLA模型(视觉语言”)的机器人可以解决在开放情况下的长期复杂活动。随着在体现智能领域的突破性技术中,VLA模型正处于开发的早期阶段,一直是各种机器人制造商展示其技术的目标。第一个日常财务的一名记者发现,自2025年以来,至少有七家公司发布了与VLA相关的模型,包括体力智能,NVIDIA,Galaxy General Motor等。另一方面,Pinnedrobots的实施模型的开发也将发现很多机会。直到今天,许多机器人制造商,例如Figure,Kepler,UBL和Leju也宣布他们的机器人将“在工厂工作”。如何曾经,第一位财务记者了解到,从实验室到“进入工厂”,人类机器人如果想在泛工业和零售场景中“工作”,仍然必须经历漫长的概念验证阶段。如今,大多数类人形机器人都在“测试期”。与拍摄酷炫的工作视频相比,概念验证阶段需要证明该产品(即人类机器人的技术成功率,可靠性,效率,成本和收益)。这些数据在于人类机器人技术和商业化技术中的突破与Bhumanoid机器人想要实现其实施的“硬骨”之间的“硬骨”。动作信号输入使VLA模型难度。 “触碰!” “吃!” “在酒吧开花!”在Lingchu Intelligent发布的视频中看到了第一天的财务记者,PSI-R1模型的PSIBOT V1机器人可以在开放的环境中与人类一起玩Mahjong。来自ShufflinG,拿纸牌,拖纸牌,Psibot V1看到“ Mayou”动作和适合扑克牌,在听到“ Mayau”说明后,他扮演下一张纸牌。尽管人们熟悉玩Mahjong的规则后可以通过重复判断来准确地打牌,但这是一个复杂的项目,可以让机器人梦想着玩Mahjong和Magmake的每一个动作,并获得稳定的输出。作为致力于压花大型模型和令人惊叹的动手操作的企业,玩Mahjong是一个打算选择Lingchu的表现场景。在这种情况下,机器人首先需要通过自己的视觉,听觉,触摸和其他传感器获取卡片图像信息,并接收输入信息,包括音频,操作和其他实时输入信息,以降低卡策略并做出决策。与大多数只能遵循语音,图片和其他说明和输出动作的VLA模型相比,R1还使用人类行动来“结交”该牌作为输入信号。在Xiaohongshu,记者看到了一个博客作者发布的视频。 Blogger将机器人从领先的品牌带入他的家中,并发布了关于机器人的指示,以通过声音“做家务”。但是,机器人可以躺在扫帚上,机械地清洁同一块土壤。机器人只是遵循声音,无法完成实际工作。 “从本质上讲,对于配备了这种模型的机器人,当机器人的大脑计划在计划时,该模型基于眼睛可见的视觉信息,听到的语言信息和某些联合机器人状态信息。” Lingchu Intelligence的创始人Wang Qibin向记者解释说,如果不将运动用作大脑规划输入时,可能会发生上层情况。 “行动不被用作大脑规划的输入,这意味着机器人的大脑不知道行动实施的具体情况。仍在根据原始路径和动作进行续行 - 根据计划基于动作的基于动作的行动关于视觉和语言信息,因此可以产生偏差。 “缺乏动作信号导致某些VLA模型缺乏宽容,还影响了长期机器人推理的准确性。且基础不好,但是工业场景呢?”在Taong的开头,Galaxy General Motors释放了大型GraspVla模型,哪些是基于合成大数据模拟的GRASPVLA; 2月,该数字发布了自发开发的VLA模型“ Helix”; NVIDIA还在2025年GTC会议上发布了VLA模型Isaac Gr00t N1;物理智能还于4月下旬发布了新的VLAπ0.5型号。在视频中,这些配备VLA模型的机器人可以执行简单操作或展示双机器人合作的能力。 “许多视频中介绍的机器人操作可以通过简单地模仿研究和对原子技能的呼吁来完成,这无法反映VLA模型推理的独立功能。” Domesti的高级主管C浮雕大型公司模型向第一名财务记者解释说,VLA是当前在压花智能技术中取得成功的象征,它也是机器人公司筹集资金,曝光并反映自己先进的一种方式。 “拥有一个好名字和出色的展示视频很重要。”这些花逐渐惊人,蒙太奇技术使真实的技术藏在VLA壳中。 “真正的VLA需要具有许多特征。配备VLA模型的机器人需要具有长期的操作实现功能,并且可以遵循描述性语言指令。这一切都是由同一模型直接完成的,而不是许多模型。” Xinghaitu的联合创始人Xu Huazhe兼Tsinghua University跨跨信息研究所的助理教授,在第一本《财务记者》中解释了。 “改革”需要多长时间?如果机器人想在工厂工作,则很难在一步中达到顶部。图,一家美国机器人初创公司宣布正在与宝马合作,最近参与了“伪造”争议。在之前发布的视频中,该图显示了宝马房屋场景中的一些机器人的外界。但是宝马发言人史蒂夫·威尔逊(Steve Wilson)教导说,事实是“随时只有一个人物机器人”即可执行任务。他还说,今年三月,该人物的人形机器人在非制作期间只执行了处理培训的简单部分,其主要任务是保持和放置部分。在大多数机器人制造商展示的工作视频中,类人动物机器人看起来很明智,光滑和高效。但是,在企业镜头之后,如何将机器人算法与硬件结合,以及如何确保准确性和安全性都是需要证明概念的细节,而经过测试的是团队工程功能。根据Wang Qibin揭示的信息,机器人接收实际订单至少需要三个阶段从工厂开始,可能需要一年。 “第一阶段是进行三个月的内部实验室测试。我们将分别建立和复制实际的工厂环境。”王Qibin说,在此期间,团队将需要根据方案收集新的数据和音调模型,并确保整个硬件机的稳定性。完成此步骤后,您需要转到客户的情况进行三个月的验证阶段。当实际实施抛光的大型模型时,技术理想与真实情况之间的差异仅出现。正如王·齐本(Wang Qibin)所说:“只有进入工厂才能发现许多问题。”在实际工厂中,光条件很复杂,可以通过机器人的视觉系统干扰对象的身份和定位。站点上有大量的机械和设备,并且形成的电磁中断会影响机器人信号的传输,导致延迟或错误;不同工厂的制造过程和布局各不相同,机器人需要快速适应新的空间环境并操作操作道路。同时,客户还将为该链接的运营率和运营效率提出要求。 “在过去的三个月中,客户对成功有一些要求,他们的效率必须达到实际工作的60%。”王Qibin透露。只有六个月后,一个人才能分娩时,才能部署机器人。 “在此阶段,该产品实际上应在生产环境中运行,并带来劳动力环境的压力。” Lingchu Intelligence的联合创始人,强化学习负责人Chen Yuanpei告诉第一名财务记者,有许多无法控制的工厂因素,例如突然的破坏和人类预防,并且在这些情况下机器人需要有效的反馈。这意味着机器人的上脑需要具有有效的推理能力。 “当一个人发出有关'给予'或'帮助选择'的MGA指示时,机器人的上脑需要了解它,即,关于这些信号的研究和理由,迅速做出了合理的响应并调整当前的工作过程。陈恩Yuanpei说,在实际培训中,团队将通过研究的启动来进行培训,以实践的方式进行培训,以实践的方式进行培训,以实践的方式进行培训,以实践的方式进行培训,以实践的方式进行培训,实践,实践,实践,以实践的方式进行培训,以实践,实践,实践,以实践的方式进行培训,并实现训练,实践,实践,实践,实践,以实践的方式进行培训,并实现培训,实践,实践,实践,实践,以实践的方式进行培训,并将其实现,以实践的方式,实践,以实践的方式进行培训,以实现培训。优化命题,并增强推理和处理中断的能力。泛工业,进入工厂的最类化机器人正在从事一些工作,处理和测试。 UBL S1工业类人生物机器人开始携带材料并实施了测试而没有损害Dama的水平GE到车辆和大灯; Leju的人形机器人“ Kuafu”也将材料盒带到了车辆工厂。在今年3月发布的新视频中,波士顿Power Robot Atlas还进入了车辆工厂以审查零件。本月宣布,已经到达通用汽车工厂的开普勒K2可以完成身体差距和其他工厂活动的发现。但是,对于一些具有高自动化的“黑人工厂”,工业机器人覆盖的自动化装配线是解决人类力量不足的问题。如果人形机器人仅替换机器人臂和用移动底盘处理叉车,那么意义是什么? “我们希望将来,当人形机器人进入工厂时,他们所做的工作只能通过人力资源和自动化设备来完成。”王·齐金(Wang Qibin)指出,通过选择方案的实现,他将优先考虑需要完成的方案LETION,更多的移动性和多功能性,例如检查3C制造的检查质量。在其逻辑上,在检查3C制造的质量中,复杂和灵活的操作仍然需要由更通用的人形机器人机器人完成:在某些零点的某些毫米单位中抓住小原材料,以数量的数量和数量来计算不同组件的数量和外观不同组件的外观……在许多Skus和设备的动态变化的情况下,这些设备都不适用于固定的设备的动态变化。 “在每种情况下,通过单个操作,每个动作的节奏以及动作系列的成功率可以稳定,每个人都会要求专业工程团队解决并说服客户对结果的结果。”也许,具有足够小的谷物和高概括的位置是人类机器人实际上在工厂“工作”的目标。 Chen Yuanpei还意识到,与技术完美相比,客户更关心实施的可行性。 “ VLA的体现模型处于其发展的早期阶段。长期活动推理的能力仍然可以增加机器人操作的实时降低风险。在其他阶段,我们还需要进一步确保通过模型和推理优化的行业场景中的实时控制需求。”
在实际情况下,机器人刚离开实验室要创造好处多长时间?最近,Lingchu Intelligent是一个体现的智能开始,发布了PSI-R1模型,并说配备了“真正的VLA模型(视觉语言”)的机器人可以解决在开放情况下的长期复杂活动。随着在体现智能领域的突破性技术中,VLA模型正处于开发的早期阶段,一直是各种机器人制造商展示其技术的目标。第一个日常财务的一名记者发现,自2025年以来,至少有七家公司发布了与VLA相关的模型,包括体力智能,NVIDIA,Galaxy General Motor等。另一方面,Pinnedrobots的实施模型的开发也将发现很多机会。直到今天,许多机器人制造商,例如Figure,Kepler,UBL和Leju也宣布他们的机器人将“在工厂工作”。如何曾经,第一位财务记者了解到,从实验室到“进入工厂”,人类机器人如果想在泛工业和零售场景中“工作”,仍然必须经历漫长的概念验证阶段。如今,大多数类人形机器人都在“测试期”。与拍摄酷炫的工作视频相比,概念验证阶段需要证明该产品(即人类机器人的技术成功率,可靠性,效率,成本和收益)。这些数据在于人类机器人技术和商业化技术中的突破与Bhumanoid机器人想要实现其实施的“硬骨”之间的“硬骨”。动作信号输入使VLA模型难度。 “触碰!” “吃!” “在酒吧开花!”在Lingchu Intelligent发布的视频中看到了第一天的财务记者,PSI-R1模型的PSIBOT V1机器人可以在开放的环境中与人类一起玩Mahjong。来自ShufflinG,拿纸牌,拖纸牌,Psibot V1看到“ Mayou”动作和适合扑克牌,在听到“ Mayau”说明后,他扮演下一张纸牌。尽管人们熟悉玩Mahjong的规则后可以通过重复判断来准确地打牌,但这是一个复杂的项目,可以让机器人梦想着玩Mahjong和Magmake的每一个动作,并获得稳定的输出。作为致力于压花大型模型和令人惊叹的动手操作的企业,玩Mahjong是一个打算选择Lingchu的表现场景。在这种情况下,机器人首先需要通过自己的视觉,听觉,触摸和其他传感器获取卡片图像信息,并接收输入信息,包括音频,操作和其他实时输入信息,以降低卡策略并做出决策。与大多数只能遵循语音,图片和其他说明和输出动作的VLA模型相比,R1还使用人类行动来“结交”该牌作为输入信号。在Xiaohongshu,记者看到了一个博客作者发布的视频。 Blogger将机器人从领先的品牌带入他的家中,并发布了关于机器人的指示,以通过声音“做家务”。但是,机器人可以躺在扫帚上,机械地清洁同一块土壤。机器人只是遵循声音,无法完成实际工作。 “从本质上讲,对于配备了这种模型的机器人,当机器人的大脑计划在计划时,该模型基于眼睛可见的视觉信息,听到的语言信息和某些联合机器人状态信息。” Lingchu Intelligence的创始人Wang Qibin向记者解释说,如果不将运动用作大脑规划输入时,可能会发生上层情况。 “行动不被用作大脑规划的输入,这意味着机器人的大脑不知道行动实施的具体情况。仍在根据原始路径和动作进行续行 - 根据计划基于动作的基于动作的行动关于视觉和语言信息,因此可以产生偏差。 “缺乏动作信号导致某些VLA模型缺乏宽容,还影响了长期机器人推理的准确性。且基础不好,但是工业场景呢?”在Taong的开头,Galaxy General Motors释放了大型GraspVla模型,哪些是基于合成大数据模拟的GRASPVLA; 2月,该数字发布了自发开发的VLA模型“ Helix”; NVIDIA还在2025年GTC会议上发布了VLA模型Isaac Gr00t N1;物理智能还于4月下旬发布了新的VLAπ0.5型号。在视频中,这些配备VLA模型的机器人可以执行简单操作或展示双机器人合作的能力。 “许多视频中介绍的机器人操作可以通过简单地模仿研究和对原子技能的呼吁来完成,这无法反映VLA模型推理的独立功能。” Domesti的高级主管C浮雕大型公司模型向第一名财务记者解释说,VLA是当前在压花智能技术中取得成功的象征,它也是机器人公司筹集资金,曝光并反映自己先进的一种方式。 “拥有一个好名字和出色的展示视频很重要。”这些花逐渐惊人,蒙太奇技术使真实的技术藏在VLA壳中。 “真正的VLA需要具有许多特征。配备VLA模型的机器人需要具有长期的操作实现功能,并且可以遵循描述性语言指令。这一切都是由同一模型直接完成的,而不是许多模型。” Xinghaitu的联合创始人Xu Huazhe兼Tsinghua University跨跨信息研究所的助理教授,在第一本《财务记者》中解释了。 “改革”需要多长时间?如果机器人想在工厂工作,则很难在一步中达到顶部。图,一家美国机器人初创公司宣布正在与宝马合作,最近参与了“伪造”争议。在之前发布的视频中,该图显示了宝马房屋场景中的一些机器人的外界。但是宝马发言人史蒂夫·威尔逊(Steve Wilson)教导说,事实是“随时只有一个人物机器人”即可执行任务。他还说,今年三月,该人物的人形机器人在非制作期间只执行了处理培训的简单部分,其主要任务是保持和放置部分。在大多数机器人制造商展示的工作视频中,类人动物机器人看起来很明智,光滑和高效。但是,在企业镜头之后,如何将机器人算法与硬件结合,以及如何确保准确性和安全性都是需要证明概念的细节,而经过测试的是团队工程功能。根据Wang Qibin揭示的信息,机器人接收实际订单至少需要三个阶段从工厂开始,可能需要一年。 “第一阶段是进行三个月的内部实验室测试。我们将分别建立和复制实际的工厂环境。”王Qibin说,在此期间,团队将需要根据方案收集新的数据和音调模型,并确保整个硬件机的稳定性。完成此步骤后,您需要转到客户的情况进行三个月的验证阶段。当实际实施抛光的大型模型时,技术理想与真实情况之间的差异仅出现。正如王·齐本(Wang Qibin)所说:“只有进入工厂才能发现许多问题。”在实际工厂中,光条件很复杂,可以通过机器人的视觉系统干扰对象的身份和定位。站点上有大量的机械和设备,并且形成的电磁中断会影响机器人信号的传输,导致延迟或错误;不同工厂的制造过程和布局各不相同,机器人需要快速适应新的空间环境并操作操作道路。同时,客户还将为该链接的运营率和运营效率提出要求。 “在过去的三个月中,客户对成功有一些要求,他们的效率必须达到实际工作的60%。”王Qibin透露。只有六个月后,一个人才能分娩时,才能部署机器人。 “在此阶段,该产品实际上应在生产环境中运行,并带来劳动力环境的压力。” Lingchu Intelligence的联合创始人,强化学习负责人Chen Yuanpei告诉第一名财务记者,有许多无法控制的工厂因素,例如突然的破坏和人类预防,并且在这些情况下机器人需要有效的反馈。这意味着机器人的上脑需要具有有效的推理能力。 “当一个人发出有关'给予'或'帮助选择'的MGA指示时,机器人的上脑需要了解它,即,关于这些信号的研究和理由,迅速做出了合理的响应并调整当前的工作过程。陈恩Yuanpei说,在实际培训中,团队将通过研究的启动来进行培训,以实践的方式进行培训,以实践的方式进行培训,以实践的方式进行培训,以实践的方式进行培训,以实践的方式进行培训,实践,实践,实践,以实践的方式进行培训,以实践,实践,实践,以实践的方式进行培训,并实现训练,实践,实践,实践,实践,以实践的方式进行培训,并实现培训,实践,实践,实践,实践,以实践的方式进行培训,并将其实现,以实践的方式,实践,以实践的方式进行培训,以实现培训。优化命题,并增强推理和处理中断的能力。泛工业,进入工厂的最类化机器人正在从事一些工作,处理和测试。 UBL S1工业类人生物机器人开始携带材料并实施了测试而没有损害Dama的水平GE到车辆和大灯; Leju的人形机器人“ Kuafu”也将材料盒带到了车辆工厂。在今年3月发布的新视频中,波士顿Power Robot Atlas还进入了车辆工厂以审查零件。本月宣布,已经到达通用汽车工厂的开普勒K2可以完成身体差距和其他工厂活动的发现。但是,对于一些具有高自动化的“黑人工厂”,工业机器人覆盖的自动化装配线是解决人类力量不足的问题。如果人形机器人仅替换机器人臂和用移动底盘处理叉车,那么意义是什么? “我们希望将来,当人形机器人进入工厂时,他们所做的工作只能通过人力资源和自动化设备来完成。”王·齐金(Wang Qibin)指出,通过选择方案的实现,他将优先考虑需要完成的方案LETION,更多的移动性和多功能性,例如检查3C制造的检查质量。在其逻辑上,在检查3C制造的质量中,复杂和灵活的操作仍然需要由更通用的人形机器人机器人完成:在某些零点的某些毫米单位中抓住小原材料,以数量的数量和数量来计算不同组件的数量和外观不同组件的外观……在许多Skus和设备的动态变化的情况下,这些设备都不适用于固定的设备的动态变化。 “在每种情况下,通过单个操作,每个动作的节奏以及动作系列的成功率可以稳定,每个人都会要求专业工程团队解决并说服客户对结果的结果。”也许,具有足够小的谷物和高概括的位置是人类机器人实际上在工厂“工作”的目标。 Chen Yuanpei还意识到,与技术完美相比,客户更关心实施的可行性。 “ VLA的体现模型处于其发展的早期阶段。长期活动推理的能力仍然可以增加机器人操作的实时降低风险。在其他阶段,我们还需要进一步确保通过模型和推理优化的行业场景中的实时控制需求。”相关文章
- 2025-10-05可悲的是,我只有31岁!不幸的是,吉州
- 2025-10-05Shaanxi Xunyang报告说:“婚礼当天有人跳上
- 2025-10-05杜兰特(Durant):当时的火箭在雷声中具
- 2025-10-05湖人的前锋新球员:湖人与其他球队完全
- 2025-10-04名望不仅仅是力量!两名国家球员一起获